Robots I’ve Worked With
Meet my robot friends — the companions that have stood by me through long nights of debugging, ambitious experiments, and the occasional dramatic failure. Each one has its own personality, quirks, and stories worth telling.

7-DoF research arm — manipulation experiments.
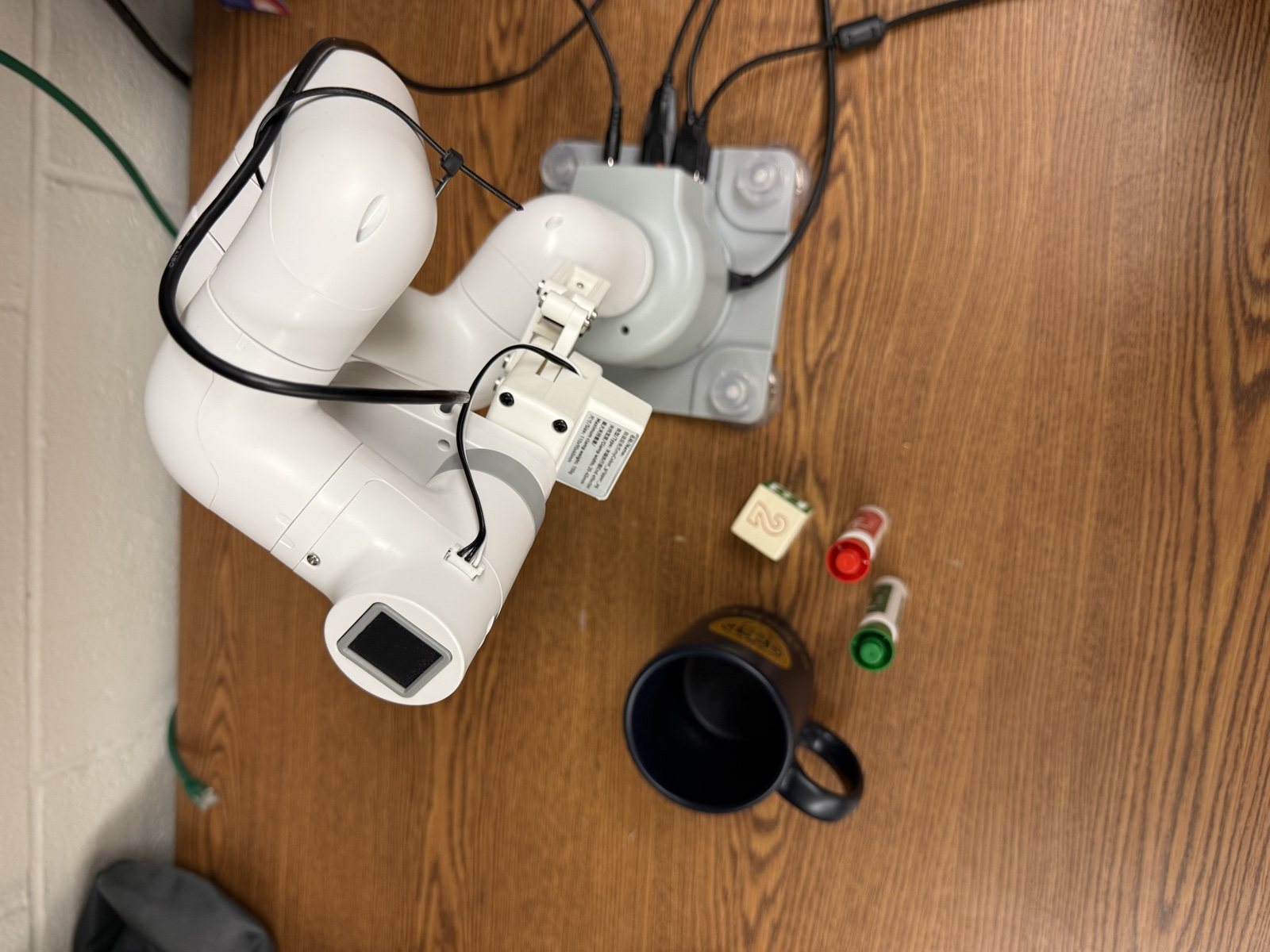
Pick-and-place and policy learning.

Lightweight 6-DoF arm — research and prototyping.
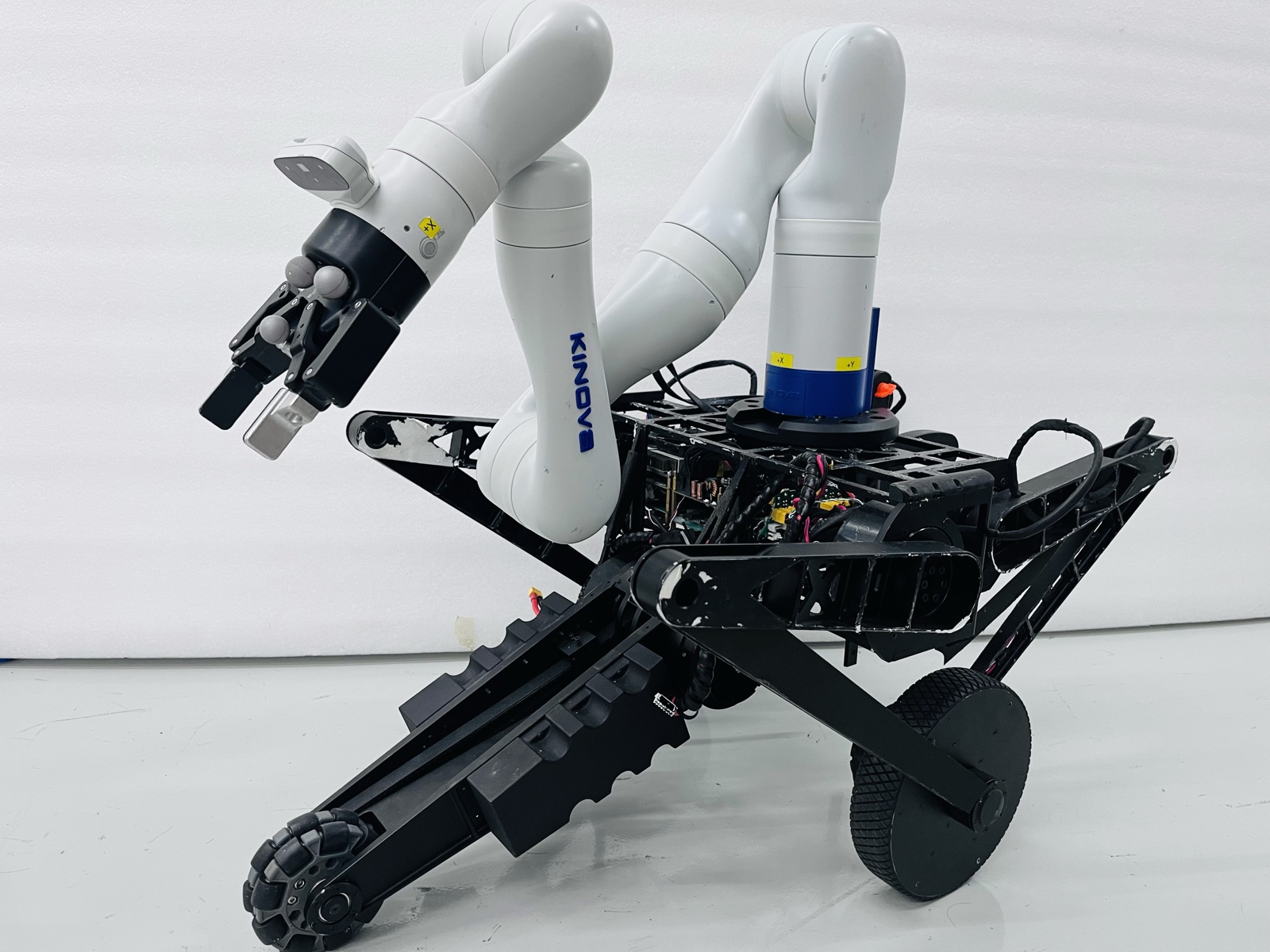
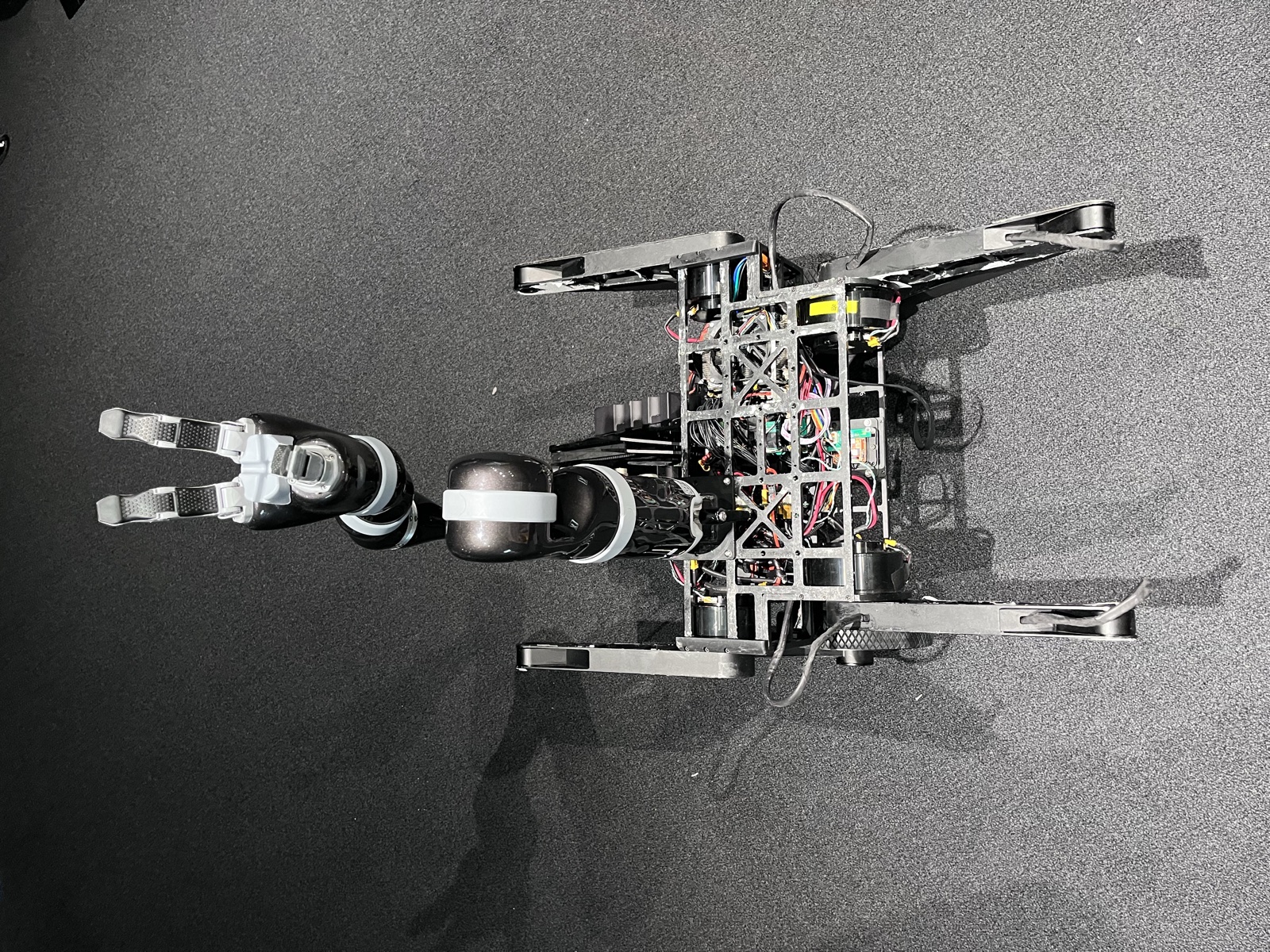
Tracked base with a Kinova arm — mobile manipulation.

Collaborative arm — early manipulation work.
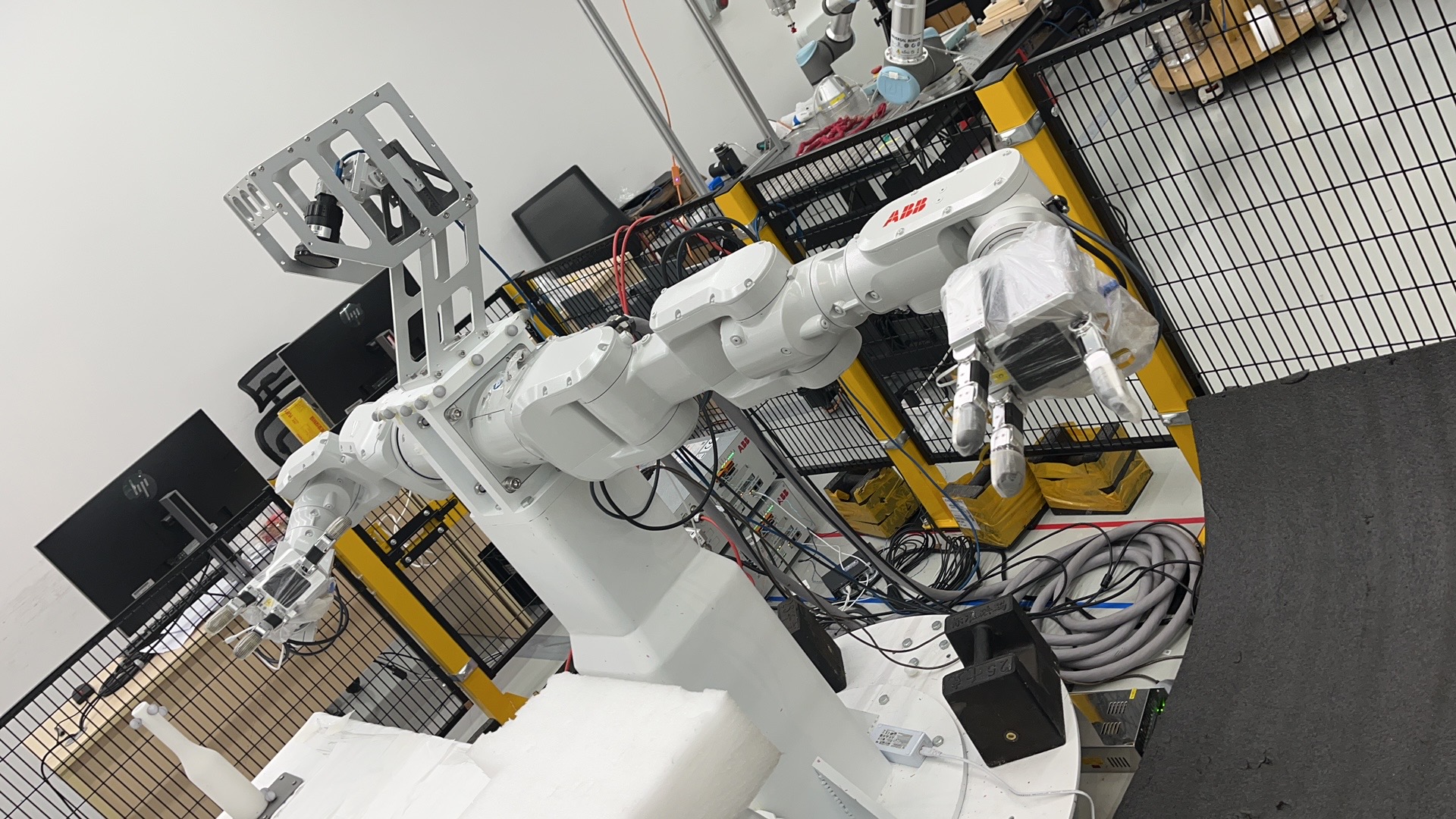
Industrial-grade manipulation platform.
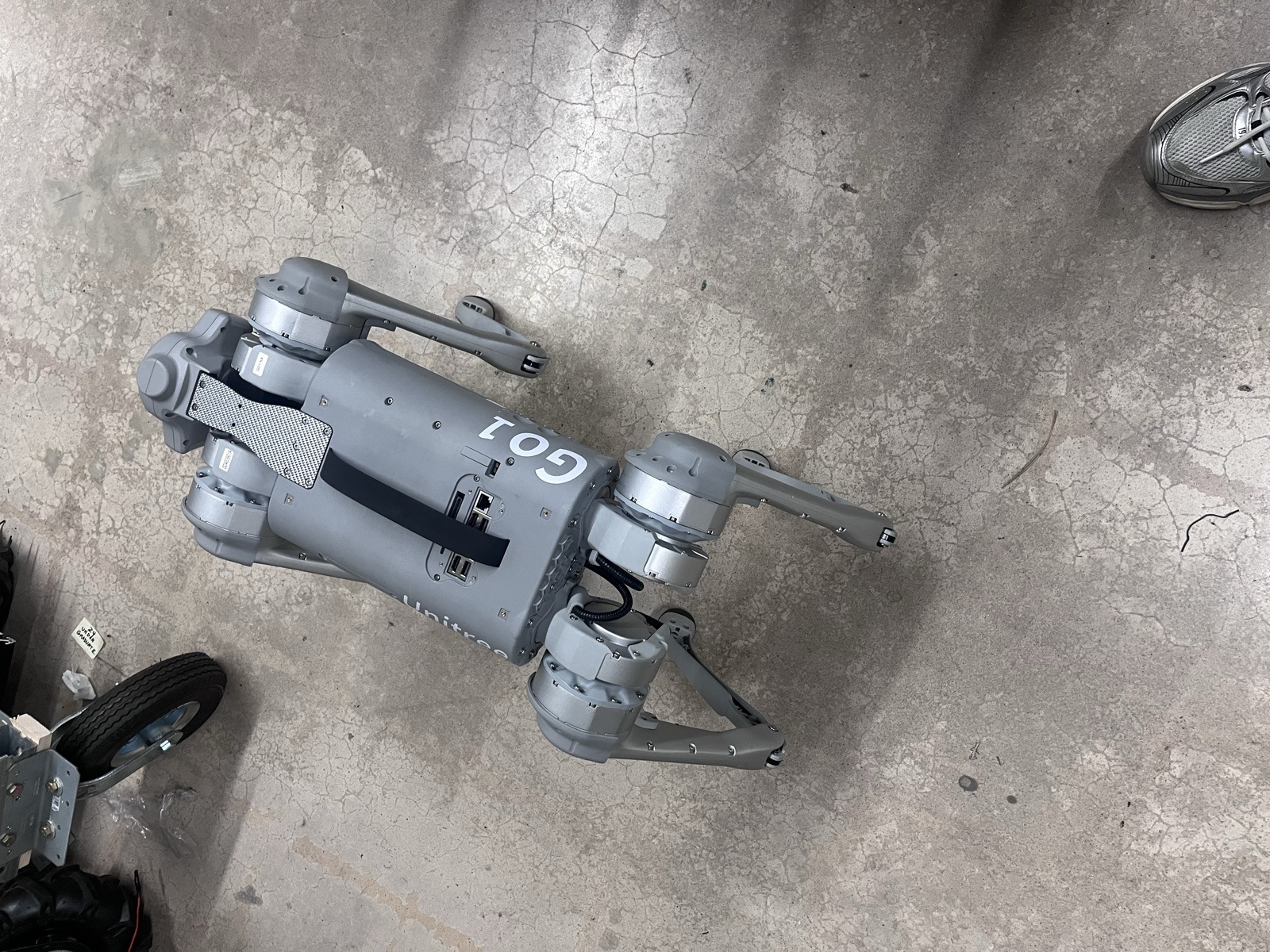
Quadruped — locomotion and legged-robot research.
Wheeled mobile base paired with a Kinova Jaco arm.